Threads
CONFIG_MULTITHREADING打开Zephyr多线程功能。
Zephyr线程有下面几个关键的特性:
- Stack area。 线程的栈大小可修改。
- thread control block
k_thread。用来保存线程的一些metadata。 - entry point function。线程开始执行运行的函数。
- scheduling priority。支持配置调度优先级。
- thread option。提供线程的一些特殊配置。
- execution mode。Supervisor/User mode。依赖于
CONFIG_USERSPACE。
Lifecycle
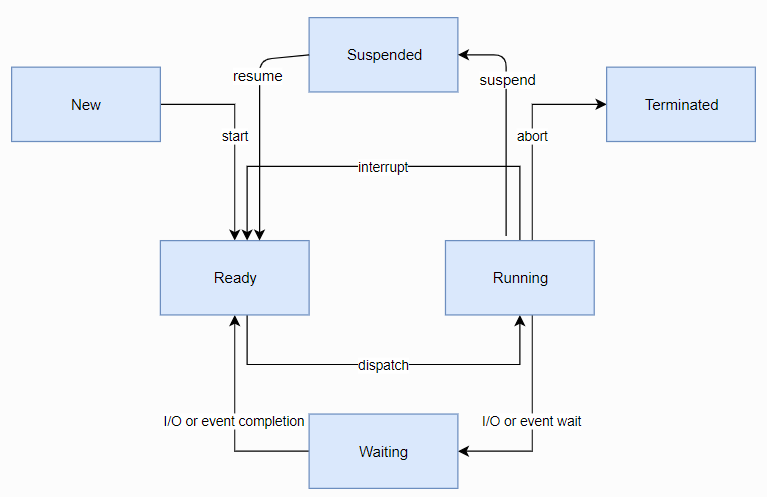
k_thread_create(): 创建线程。k_thread_join(): 阻塞等待线程终止。k_thread_abort(): 发生异常情况,线程可以由自己或其他线程来终结。k_thread_suspend(), k_thread_resume(): 线程suspend后只有通过resume才能重新调度。
Thread States
Thread Stack objects
初始化线程栈相关属性,如果线程只在内核运行,用K_KERNEL_STACK_XXX。
如果是user space线程,用K_THREAD_STACK_XXX。
如果CONFIG_USERSPACE没打开,那么K_THREAD_STACK等于K_KERNEL_STACK。
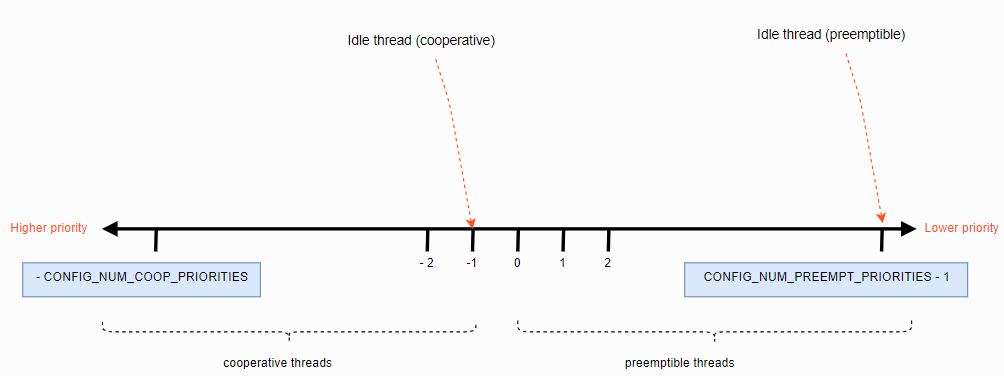
Thread Priorities
优先级数字越小,优先级越高。
cooperative thread可配置的优先级为 -CONFIG_NUM_COOP_PRIORITIES到-1。
preemptible thread可配置的优先级为0到 (CONFIG_NUM_PREEMPT_PRIORITIES-1)。
可见cooperative thread的优先级肯定比preemptible thread高。
Cooperative thread是需要主动交出CPU控制权的,否则会一直执行该线程。
Preemptible thread是根据时间片轮转调度的,会自动切换线程。
Meta-IRQ Priorities
// TODO:
APIs
创建线程:
方法1:
k_tid_t k_thread_create(struct k_thread *new_thread, k_thread_stack_t *stack,
size_t stack_size, k_thread_entry_t entry,
void *p1, void *p2, void *p3, int prio,
uint32_t options, k_timeout_t delay)
- 线程栈必须使用
K_THREAD_STACK_DEFINEorK_KERNEL_STACK_DEFINE定义。 - 线程栈大小必须是传入给
K_THREAD_STACKorK_KERNEL_STACK宏的大小。或者利用K_THREAD_STACK_SIZEOF()/K_KERNEL_STACK_SIZEOF(),对用K_THREAD_STACK/K_KERNEL_STACK创建线程返回的结构体。
e.g.
#define MY_STACK_SIZE 500
#define MY_PRIORITY 5
extern void my_entry_point(void *, void *, void *);
K_THREAD_STACK_DEFINE(my_stack_area, MY_STACK_SIZE);
struct k_thread my_thread_data;
k_tid_t my_tid = k_thread_create(&my_thread_data, my_stack_area,
K_THREAD_STACK_SIZEOF(my_stack_area),
my_entry_point,
NULL, NULL, NULL,
MY_PRIORITY, 0, K_NO_WAIT);
方法2:
利用宏K_THREAD_DEFINE,在编译期定义。
#define MY_STACK_SIZE 500
#define MY_PRIORITY 5
extern void my_entry_point(void *, void *, void *);
K_THREAD_DEFINE(my_tid, MY_STACK_SIZE,
my_entry_point, NULL, NULL, NULL,
MY_PRIORITY, 0, 0);
Thread Options
上面的options可以传入的选项有(省略了一些不常用的):
K_ESSENTIAL: 表示这是基础线程,任何termination或aborting都会导致系统错误。K_FP_REGS: 线程使用CPU浮点计算,调度的时候会保存和恢复浮点计算寄存器组。K_USER: 如果CONFIG_USERMODEenable了,这个选项表示是用户级线程。K_INHERIT_PERMS: 如果CONFIG_USERMODEenable了,会继承父线程所有内核对象权限。
Thread Custom Data
每个线程都有一个私有的32-bit数据,通过下面两个API读写。需要打开CONFIG_THREAD_CUSTOM_DATA开关。
k_thread_custom_data_set()k_thread_custom_data_get()
e.g.
call_count = (uint32_t)k_thread_custom_data_get();
call_count++;
k_thread_custom_data_set((void *)call_count);
调度源码分析
Pend当前线程的API:
int z_pend_curr(struct k_spinlock *lock, k_spinlock_key_t key,
_wait_q_t *wait_q, k_timeout_t timeout)
{
#if defined(CONFIG_TIMESLICING) && defined(CONFIG_SWAP_NONATOMIC)
pending_current = _current;
#endif
__ASSERT_NO_MSG(sizeof(sched_spinlock) == 0 || lock != &sched_spinlock);
(void) k_spin_lock(&sched_spinlock);
pend_locked(_current, wait_q, timeout); //如果timeout是K_FOREVER不会阻塞,直接调度到其他线程
k_spin_release(lock);
return z_swap(&sched_spinlock, key);
}
spin lock在单核系统中就是屏蔽一些HW中断。
k_spin_lock();
k.key = arch_irq_lock();
static ALWAYS_INLINE unsigned int arch_irq_lock(void)
{
unsigned int key;
unsigned int tmp;
__asm__ volatile(
"mov %1, %2;"
"mrs %0, BASEPRI;"
"msr BASEPRI_MAX, %1;"
"isb;"
: "=r"(key), "=r"(tmp)
: "i"(_EXC_IRQ_DEFAULT_PRIO)
: "memory");
return key;
}
key是%0, tmp是%1, _EXC_IRQ_DEFAULT_PRIO是%2,该宏为(1«5)。
首先将宏_EXC_IRQ_DEFAULT_PRIO传入tmp, 再将BASEPRI寄存器值传入key用于返回保存。
最后把tmp中的值,即_EXC_IRQ_DEFAULT_PRIO写入``BASEPRI_MAX寄存器,BASEPRI_MAX和BASEPRI是同一个寄存器,当指定BASEPRI_MAX表示只有在新值高于(即优先级数值更低)当前值的情况下,才会更新只更新BASEPRI`。
系统不会处理大于等于BASEPRI设置的值的中断优先级的中断。
/* On ARMv7-M and ARMv8-M Mainline CPUs, this function prevents regular
* exceptions (i.e. with interrupt priority lower than or equal to
* _EXC_IRQ_DEFAULT_PRIO) from interrupting the CPU. NMI, Faults, SVC,
* and Zero Latency IRQs (if supported) may still interrupt the CPU.
*/
pend_locked();
add_to_waitq_locked(thread, wait_q);
add_thread_timeout(thread, timeout);
static void add_to_waitq_locked(struct k_thread *thread, _wait_q_t *wait_q)
{
unready_thread(thread); // 把当前thread从run queue中移除
z_mark_thread_as_pending(thread); // 把thread_state设置为pending
if (wait_q != NULL) {
thread->base.pended_on = wait_q;
z_priq_wait_add(&wait_q->waitq, thread); // 加入到waitq中
}
}
static void add_thread_timeout(struct k_thread *thread, k_timeout_t timeout)
{
if (!K_TIMEOUT_EQ(timeout, K_FOREVER)) {
z_add_thread_timeout(thread, timeout);
}
}
z_add_thread_timeout();
z_thread_timeout();
z_sched_wake_thread(thread, true); // 等待timeout之间后,唤醒当前线程
如果z_pend_curr传入的是NO_WAIT的话,当前线程会立刻进入睡眠,等待其他线程唤醒,并由其他线程设置return value。
如果z_pend_curr传入的是一段时间,那么当前线程会进入睡眠建立一个timer,固定时间后唤醒,如果在睡眠期间别的线程完成了任务,会把return value设置为0并重新调度,否则超时唤醒timer,返回错误。
其他线程唤醒pending线程的过程:
z_unpend_first_thread();
arch_thread_return_value_set();
z_ready_thread();
z_reschedule();