1. SPI协议介绍
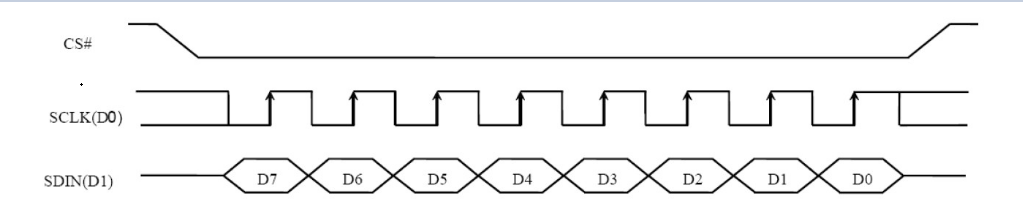
CPOL:表示SPICLK的初始电平,0为低电平,1为高电平
CPHA:表示相位,即第一个还是第二个时钟沿采样数据,0为第一个时钟沿,1为第二个时钟沿
| CPOL | CPHA | 模式 | 含义 |
|---|---|---|---|
| 0 | 0 | 0 | SPICLK初始电平为低电平,在第一个时钟沿采样数据 |
| 0 | 1 | 1 | SPICLK初始电平为低电平,在第二个时钟沿采样数据 |
| 1 | 0 | 2 | SPICLK初始电平为高电平,在第一个时钟沿采样数据 |
| 1 | 1 | 3 | SPICLK初始电平为高电平,在第二个时钟沿采样数据 |
我们常用的是模式0和模式3,因为它们都是在上升沿采样数据,不用去在乎时钟的初始电平是什么,只要在上升沿采集数据就行。
2. SPI driver
2.2 spi_controller
include/linux/spi.h
2.3 spi_device
include/linux/spi.h
2.4 spi_transfer、spi_message
在SPI子系统中,用spi_transfer结构体描述一个传输,用spi_message管理整个传输。可以构造多个spi_transfer结构体,把它们放入一个spi_message里面。
SPI传输时,发出N个字节,就可以同时得到N个字节。
- 即使只想读N个字节,也必须发出N个字节:可以发出0xff
- 即使只想发出N个字节,也会读到N个字节:可以忽略读到的数据。
3. SPI 设备树处理
SPI Master
必须的属性如下:
- address-cells:这个SPI Master下的SPI设备,需要多少个cell来表述它的片选引脚
- size-cells:必须设置为0
- compatible:根据它找到SPI Master驱动
可选的属性如下:
- cs-gpios:SPI Master可以使用多个GPIO当做片选,可以在这个属性列出那些GPIO
- num-cs:片选引脚总数
SPI Device
必须的属性如下:
- compatible:根据它找到SPI Device驱动
- reg:用来表示它使用哪个片选引脚
- spi-max-frequency:必选,该SPI设备支持的最大SPI时钟
可选的属性如下:
- spi-cpol:这是一个空属性(没有值),表示CPOL为1,即平时SPI时钟为低电平
- spi-cpha:这是一个空属性(没有值),表示CPHA为1),即在时钟的第2个边沿采样数据
- spi-cs-high:这是一个空属性(没有值),表示片选引脚高电平有效
- spi-3wire:这是一个空属性(没有值),表示使用SPI 三线模式
- spi-lsb-first:这是一个空属性(没有值),表示使用SPI传输数据时先传输最低位(LSB)
- spi-tx-bus-width:表示有几条MOSI引脚;没有这个属性时默认只有1条MOSI引脚
- spi-rx-bus-width:表示有几条MISO引脚;没有这个属性时默认只有1条MISO引脚
- spi-rx-delay-us:单位是毫秒,表示每次读传输后要延时多久
- spi-tx-delay-us:单位是毫秒,表示每次写传输后要延时多久
示例:
spi@f00 {
#address-cells = <1>;
#size-cells = <0>;
compatible = "fsl,mpc5200b-spi","fsl,mpc5200-spi";
reg = <0xf00 0x20>;
interrupts = <2 13 0 2 14 0>;
interrupt-parent = <&mpc5200_pic>;
ethernet-switch@0 {
compatible = "micrel,ks8995m";
spi-max-frequency = <1000000>;
reg = <0>;
};
codec@1 {
compatible = "ti,tlv320aic26";
spi-max-frequency = <100000>;
reg = <1>;
};
};
4. spidev的使用(SPI用户态API)
- 内核驱动:
drivers\spi\spidev.c - 内核提供的测试程序:
tools\spi\spidev_fdx.c - 内核文档:
Documentation\spi\spidev
4.1 spidev驱动程序分析
内核驱动:drivers\spi\spidev.c
spidev_write();
spidev_sync_write();
spidev_sync();
spidev_read();
spidev_sync_read();
spidev_sync();
spidev_ioctl();
// 在应用层通过ioctl(fd, SPI_IOC_MESSAGE(x), xfer) 来调用,进行spi传输. 参考spidev_fdx.c
4.2 spidev应用程序分析
内核提供的测试程序:tools\spi\spidev_fdx.c
使用方法:
spidev_fdx [-h] [-m N] [-r N] /dev/spidevB.D
h: 打印用法
m N:先写1个字节0xaa,再读N个字节,**注意:**不是同时写同时读
r N:读N个字节
4.3 spidev缺点
使用read、write函数时,只能读、写,这是半双工方式。
使用ioctl可以达到全双工的读写。
但是spidev有2个缺点:
- 不支持中断
- 只支持同步操作,不支持异步操作:就是read/write/ioctl这些函数只能执行完毕才可返回
5.1 SPI传输接口函数
/include/linux/spi/spi.h
// 简易函数
static inline int spi_write(struct spi_device *spi, const void *buf, size_t len);
static inline int spi_read(struct spi_device *spi, void *buf, size_t len);
extern int spi_write_then_read(struct spi_device *spi, const void *txbuf, unsigned n_tx, void *rxbuf, unsigned n_rx);
static inline ssize_t spi_w8r8(struct spi_device *spi, u8 cmd);
static inline ssize_t spi_w8r16(struct spi_device *spi, u8 cmd);
static inline ssize_t spi_w8r16be(struct spi_device *spi, u8 cmd);
// 复杂函数
extern int spi_async(struct spi_device *spi, struct spi_message *message);
extern int spi_sync(struct spi_device *spi, struct spi_message *message);
static inline int spi_sync_transfer(struct spi_device *spi, struct spi_transfer *xfers, unsigned int num_xfers);