This article is out of date and need to rewrite.
http://www.wowotech.net/pm_subsystem/suspend_and_resume.html
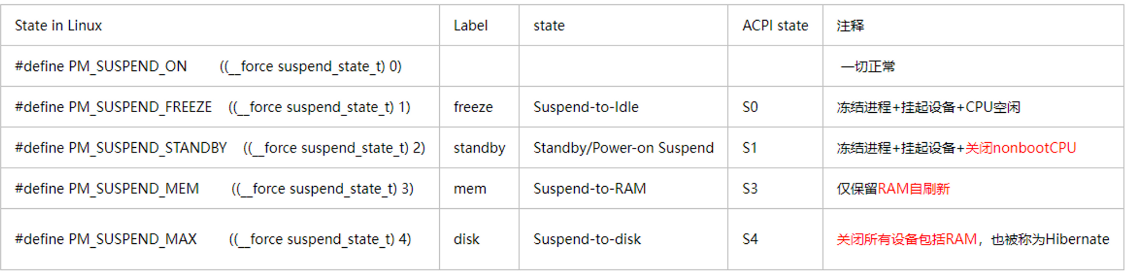
Linux内核提供了三种Suspend: Freeze、Standby和STR(Suspend to RAM),在用户空间向”/sys/power/state”文件分别写入”freeze”、”standby”和”mem”,即可触发它们。
echo "freeze" > /sys/power/state
echo "standby" > /sys/power/state
echo "mem" > /sys/power/state
参考文章:
https://www.cnblogs.com/arnoldlu/p/6253665.html
系统睡眠模型
- On S0 - working
- Standby S1 - CPU and RAM are powered but not executed
- Suspend to RAM S3 - RAM is powered and the running content is saved to RAM
- Suspend to Disk , Hibernation(disk) S4 - All content is saved to Disk and power down 嵌入式系统中一般没有
Runtime电源管理模型
在运行状态下如何省电
Linux系统Suspend的实现
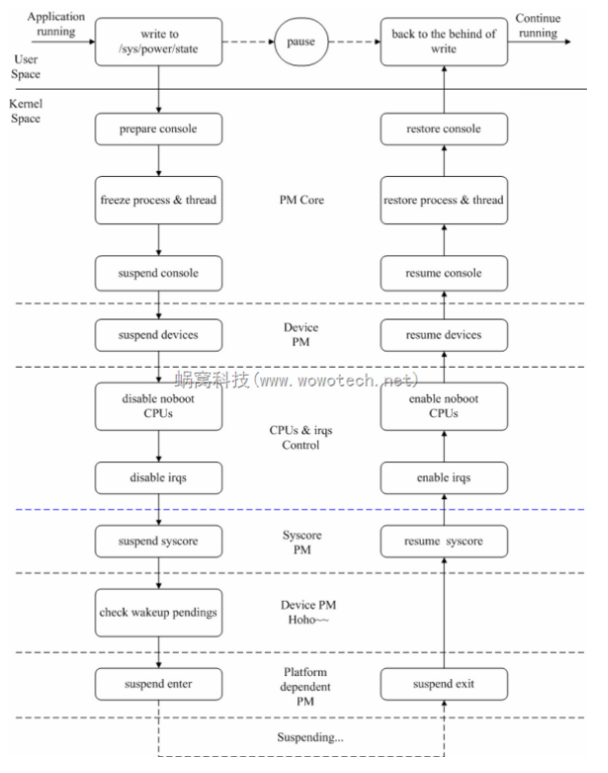
启动 suspend to ram:
echo mem > sys/power/state
state_store (kernel/power/main.c)
pm_suspend (kernel/power/suspend.c)
enter_state (kernel/power/suspend.c)
suspend_prepare (kernel/power/suspend.c)
pm_prepare_console(kernel/power/console.c) // 将当前console切换到一个虚拟console并重定向内核的kmsg
__pm_notifier_call_chain (kernel/power/main.c) // 通知所有关系“休眠消息”的驱动程序
suspend_freeze_processes (kernel/power/power.h) // 冻结app和内核线程
suspend_devices_and_enter (kernel/power/suspend.c) // 让设备进入休眠状态
suspend_ops->begin 如果平台相关的代码有begin函数则调用它 ,**arm/arch/mach-realtek/pm.c**
suspend_console (kernel/power/suspend.c)
dpm_suspend_start (PMSG_SUSPEND) (drivers/base/power/main.c)
dpm_prepare(state) (drivers/base/power/main.c) 对于dmp_list链表中的每一个设备,都调用device_prepare(dev, state);
对于该设备调用它的dev→pm_domain→ops.prepare 或
dev→type→pm→prepare 或
dev→class→pm→prepare 或
dev→bus→pm→prepare 或
dev→driver→pm→prepare
dpm_suspend(state) (drivers/base/power/main.c) 让各类设备休眠,对于dpm_prepare_list链表中的每一个设备,都调用device_suspend(dev)
__device_suspend(dev, pm_transition, false)
对于该设备,调用它的dev→pm_domain→ops.suspend 或
dev→type→pm→suspend 或
dev→class→pm→suspend 或
dev→bus→pm→suspend 或
dev→driver→pm→suspend
suspend_enter(state, &wakeup) (kernel/power/suspend.c)
suspend_ops→prepare
dpm_suspend_late(state) (drivers/base/power/main.c) 对于dpm_suspend_list链表中的每一个设备,都调用device_suspend_late(dev, state)
对于该设备,调用它的dev→pm_domain→ops.suspend_late 或
dev→type→pm→suspend_late 或
dev→class→pm→suspend_late 或
dev→bus→pm→suspend_late 或
dev→driver→pm→suspend_late
suspend_ops→prepare_late()
disable_nonboot_cpus()
arch_suspend_disable_irqs()
syscore_suspend()
suspend_ops→enter(state)
power_attr(state);
#define power_attr(_name) \
static struct kobj_attribute _name##_attr = { \
.attr = { \
.name = __stringify(_name), \
.mode = 0644, \
}, \
.show = _name##_show, \
.store = _name##_store, \
}
给驱动程序添加电源管理功能
1. 通知notifier
在冻结APP之前,使用pm_notifier_call_chain(PM_SUSPEND_PREPARE)来通知驱动程序
在重启APP后,使用pm_notifier_call_chain(PM_POST_SUSPEND)来通知驱动程序
如果驱动程序有事情在上述时机要处理,可以使用register_pm_notifier注册一个notifier
添加suspend、resume函数(常用)
在platform_driver中可以定义.suspend、.resume两个函数(老方法)
// pinctrl-rts3917.c
static struct platform_driver rts_pinctrl_driver = {
.probe = rts_pinctrl_probe,
.remove = rts_pinctrl_remove,
.suspend = rts_pinctrl_suspend,
.resume = rts_pinctrl_resume,
.driver = {
.name = "pinctrl_rts3917",
.owner = THIS_MODULE,
.of_match_table = rts_pinctrl_match,
},
};
新的内核推荐在driver中定义一个.pm结构体,在其中实现suspend、resume,比如:
static struct dev_pm_ops xxx =
{
.suspend = rts_pinctrl_suspend,
.resume = rts_pinctrl_resume,
}
static struct platform_driver rts_pinctrl_driver = {
.probe = rts_pinctrl_probe,
.remove = rts_pinctrl_remove,
.driver = {
.name = "pinctrl_rts3917",
.owner = THIS_MODULE,
.of_match_table = rts_pinctrl_match,
.pm = &xxx,
},
};
Runtime PM
runtime PM 提供辅助函数:
- 增加计数/减少计数
- 使能runtime PM
内核驱动示例driver/dma/rts_dmac.c
修改驱动程序和使用:
- 在dev_pm_ops中提供3个回调函数:runtime_suspend, runtime_resume, runtime_idle
- 在对应的系统调用接口里调用:
probe函数中:pm_runtime_enable(&pdev->dev); 使能Runtime PM 修改power.disable_depth变量
remove函数中:pm_runtime_disable(&pdev->dev); 禁止Runtime PM 修改power.disable_depth变量
pm_runtime_get_sync(&pdev->dev); 增加计数值
pm_runtime_put_sync(&pdev->dev); 减小计数值
如何使用runtime PM:
echo on > /sys/devices/…/power/control // 导致control_store->pm_runtime_forbid(dev);
atomic_inc(&dev->power.usage_count); rpm_resume(dev, 0); echo auto > /sys/devices/.../power/control // 导致control_store->pm_runtime_allow(dev); atomic_dec_and_test(&dev->power.usage_count); rpm_idle(dev, RPM_AUTO | RPM_ASYNC);在对应的系统调用接口里调用:pm_runtime_get_sync / pm_runtime_put_sync
autosuspend: 如果不想让设备频繁开关,可以使用autosuspend功能
驱动里:执行pm_runtime_use_autosuspend来设置启动autosuspend功能
//put设备时,执行这两个函数:
pm_runtime_mark_last_busy();
pm_runtime_put_sync_autosuspend();
用户空间:执行echo 秒数 > /sys/devices/xxx/power/autosuspend_delay_ms
流程分析:
pm_runtime_get_sync(include/linux/pm_runtime.h)
__pm_runtime_resume(dev, RPM_GET_PUT) (drivers/base/runtime.c)
atomic_inc(&dev->power.usage_count); // 增加使用计数
rpm_resume(dev, rpmflags); // resume 设备
if (dev->power.disable_depth > 0) // 该变量初始值为1,要使用runtime PM,要先enable
retval = -EACCES;
if (!dev->power.timer_autosuspends) // 为防止设备频繁地开关,可以设置autosuspends的值
pm_runtime_deactivate_timer(dev);
if (dev->power.runtime_status == RPM_ACTIVE) { // 如果设备已经是RPM_ACTIVE 就不用resume 直接返回
// 如果设备处于RPM_RESUMING或RPM_SUSPENDING,等待该操作完成
//Increment the parent's usage counter and resume it is necessary
//resume设备本身,前面4个函数被称为subsystem-level callback
callback = RPM_GET_CALLBACK(dev, runtime_resume);
ops = &dev->pm_domain->ops->runtime_resume; 或
ops = dev->type->pm->runtime_resume; 或
ops = dev->class->pm->runtime_resume; 或
ops = dev->bus->pm->runtime_resume; 或
如果都没定义,则调用我们在驱动中定义的函数
dev->driver->pm->runtime_resume
// 成功时,给父亲的child_count加1
if (parent)
atomic_inc(&parent->power.child_count);
// 唤醒其他进程
wake_up_all(&dev->power.wait_queue);
// 如果resume失败,让设备进入idle状态
if (retval >= 0)
rpm_idle(dev, RPM_ASYNC);
pm_runtime_put_sync
__pm_runtime_idle(dev, RPM_GET_PUT)
atomic_dec_and_test(&dev->power.usage_count) // 减小使用计数
rpm_idle(dev, rpmflags) // 让设备进入idle状态
rpm_check_suspend_allowed(dev); // 检查是否允许设备进入suspend状态
if (dev->power.disable_depth > 0) // 失败
if (atomic_read(&dev->power.usage_count) > 0) // 当前的使用计数不是0也失败
if (!dev->power.ignore_children &&
atomic_read(&dev->power.child_count)) // 如果有子设备没suspend也失败
if (dev->power.runtime_status != RPM_ACTIVE) // 如果设备不是RPM_ACTIVE状态,直接返回也不用suspend了
callback = RPM_GET_CALLBACK(dev, runtime_idle);
ops = &dev->pm_domain->ops->runtime_idle; 或
ops = dev->type->pm->runtime_idle; 或
ops = dev->class->pm->runtime_idle; 或
ops = dev->bus->pm->runtime_idle; 或
如果都没定义,则调用我们在驱动中定义的函数
dev->driver->pm->runtime_idle
__rpm_callback(callback, dev);
wake_up_all(&dev->power.wait_queue);
如果设备不提供runtime_idle,则最终会调用runtime_suspend